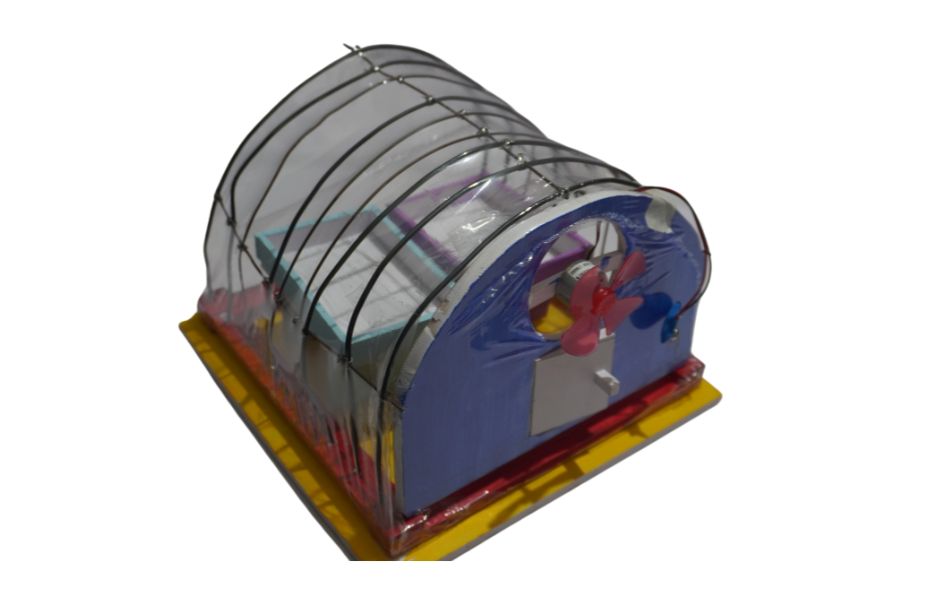


Cam Based Robot working model
ROBOTIC LAB EQUIPMENT WORKING MODEL / ROBOTIC EXHIBITION WORKING MODEL / ROBOTIC WORKING MODEL
4 in stock
Cam Based Robot working model
Building a cam-based robot working model can be a fascinating project for students, allowing them to explore mechanical design, motion control, and basic robotics principles. Below is a step-by-step guide to creating a basic cam-based robot model:
**Materials Needed:**
1. Cardboard or foam board for the chassis
2. DC motors and motor drivers
3. Wheels or tracks for mobility
4. Camshaft or cam mechanism
5. Pushrods or linkages
6. Microcontroller (Arduino or Raspberry Pi)
7. Battery pack
8. Various tools (scissors, cutter, ruler, etc.)
9. Glue, tape, screws, and fasteners
**Steps:**
**1. Design the Chassis:**
– Sketch out the design of the robot’s chassis on cardboard or foam board. Consider the size and shape based on the components you plan to incorporate.
– Cut out the chassis pieces and assemble them to form the robot’s body using glue or tape.
**2. Install the Motors and Mobility System:**
– Attach DC motors to the chassis using screws or adhesive, ensuring proper alignment.
– Mount wheels or tracks onto the motors to provide mobility for the robot.
**3. Design the Cam Mechanism:**
– Sketch out the design of the camshaft or cam mechanism, which will generate motion for the robot.
– Determine the desired motion pattern (e.g., linear, oscillating) and design the cam profile accordingly.
**4. Attach Pushrods or Linkages:**
– Connect pushrods or linkages between the camshaft and the robot’s moving parts (e.g., wheels).
– Ensure that the pushrods are securely attached and allow for smooth movement as the cam rotates.
**5. Wire and Connect Electronics:**
– Wire the DC motors to motor drivers and connect them to the microcontroller for control.
– Connect any additional sensors or components required for the robot’s operation, such as obstacle detection sensors or LEDs.
**6. Program the Microcontroller:**
– Write code to control the robot’s movement based on the camshaft’s rotation.
– Use Arduino IDE or Python for Raspberry Pi to program the microcontroller.
– Implement algorithms to translate the cam’s motion into commands for the motors.
**7. Test and Refine:**
– Test the robot in a controlled environment to ensure that it moves according to the desired motion pattern.
– Fine-tune the cam profile or adjust the linkage connections as needed to improve performance.
– Conduct trial runs to verify that the robot operates smoothly and reliably.
**8. Demonstration and Presentation:**
– Showcase the cam-based robot to students, teachers, or parents, demonstrating its motion and functionality.
– Explain the design and mechanics of the cam mechanism, highlighting the STEM principles involved in its construction.
– Encourage students to discuss the robot’s operation and potential applications in different scenarios.
Building a cam-based robot model provides students with hands-on experience in mechanical engineering, motion control, and robotics, fostering creativity, problem-solving skills, and STEM literacy. It offers an engaging educational opportunity to learn about mechanisms and their applications in real-world systems.
Precision Motion Control
Innovative Cam Mechanism for Fluid Movements Discover the precision and efficiency of the Cam Based Robot Working Model, a pivotal tool in robotics and mechanical engineering education. This model uses a cam mechanism, typically used in modern machinery for translating rotational motion into linear motion, to demonstrate complex mechanical principles in a tangible and interactive way.
Educational and Professional Tool
Explore Advanced Mechanical Concepts The Cam Based Robot is not just a teaching aid but a robust educational tool that helps students and professionals alike understand the workings of cam mechanisms used in various applications like automated machinery and robotics. It features adjustable cams to change motion outputs and is an excellent resource for hands-on learning and experimentation.
Why Choose Our Cam Robot?
A Step Towards Advanced Robotics Opting for our Cam Based Robot Working Model means choosing a pathway to advanced mechanical understanding. It is designed to give users a deep dive into the practical applications of cams in automated systems, enhancing both theoretical knowledge and practical skills in mechanical design and robotics.
| Weight | 2 kg |
|---|---|
| Dimensions | 40 × 25 × 30 cm |
You must be logged in to post a review.
Q & A
Related Products


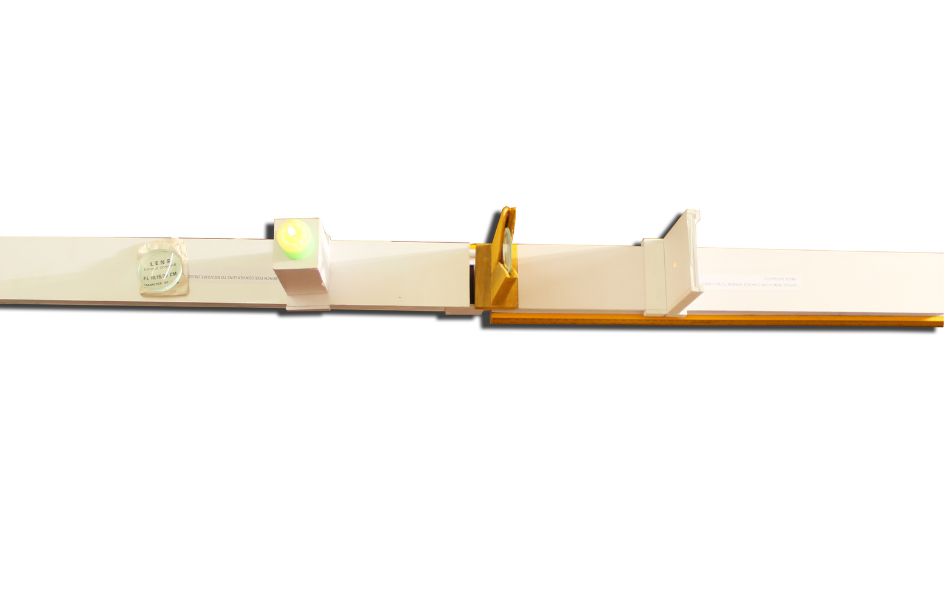
TOTAL INTERNAL REFLECTION WORKING MODEL
Original price was: ₹1,650.00.₹1,375.00Current price is: ₹1,375.00.
AC ELECTRIC GENERATOR WORKING MODEL
Original price was: ₹1,800.00.₹1,500.00Current price is: ₹1,500.00.
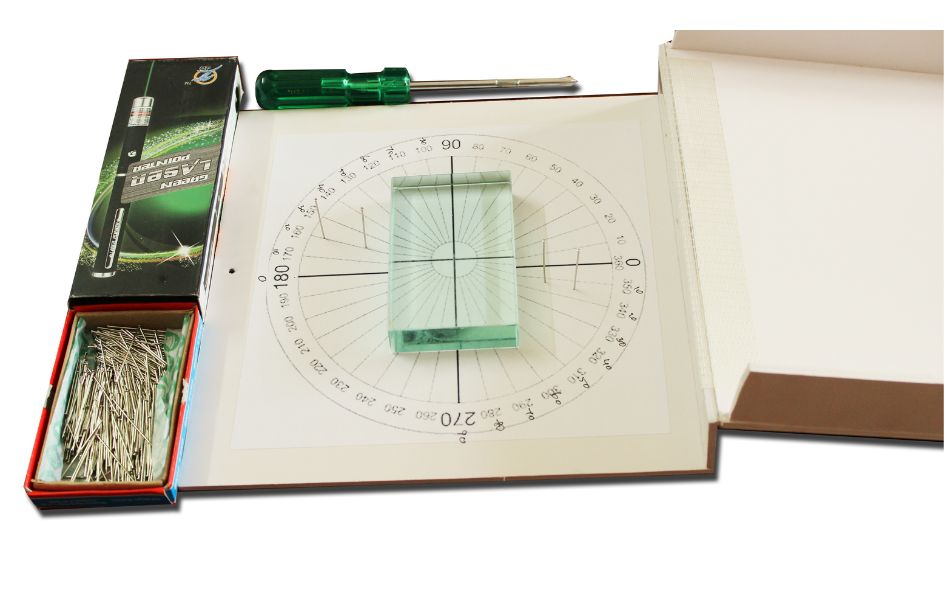
REFRACTION THROUGH GLASS SLAB AND REFRACTIVE INDEX OF THE GLASS SLAB WORKING MODEL
Original price was: ₹1,680.00.₹1,400.00Current price is: ₹1,400.00.
OERSTED EXPERIMENT WORKING MODEL
Original price was: ₹1,200.00.₹1,000.00Current price is: ₹1,000.00.
BASIC ELECTRIC CIRCUIT ( THREE CASES) WORKING MODEL
Original price was: ₹1,110.00.₹925.00Current price is: ₹925.00.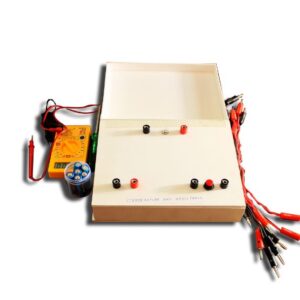
TEMPERATURE AND RESISTANCE WORKING MODEL
Original price was: ₹1,380.00.₹1,150.00Current price is: ₹1,150.00.

Reviews
There are no reviews yet